Equation based Modeling🔗
Modelon Impact is based on the idea of modeling reuse and acausal modeling. Acausal modeling is also known as equation-based or physics-based modeling.
The idea behind this is that you never have to write a piece of code more than once. This means that you define the behavior of the model via equations but leave out the order of the calculations to the tool.
The same model can then be used in various types of systems and analyses, as the order of execution is automatically adjusted by the tool for each use case.
Note
The automatic process of sorting the equations is done by the tool during the compilation process.
Physical modeling versus block-oriented modeling🔗
To illustrate the advantages of the physics-based modeling approach, we look at a model of an electric drive. The model consists of a rotational speed controller, an electric circuit and a mechanical drive train.
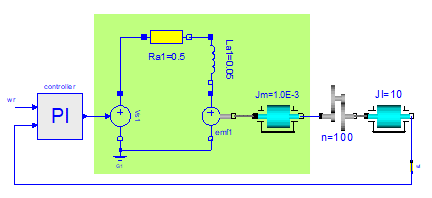
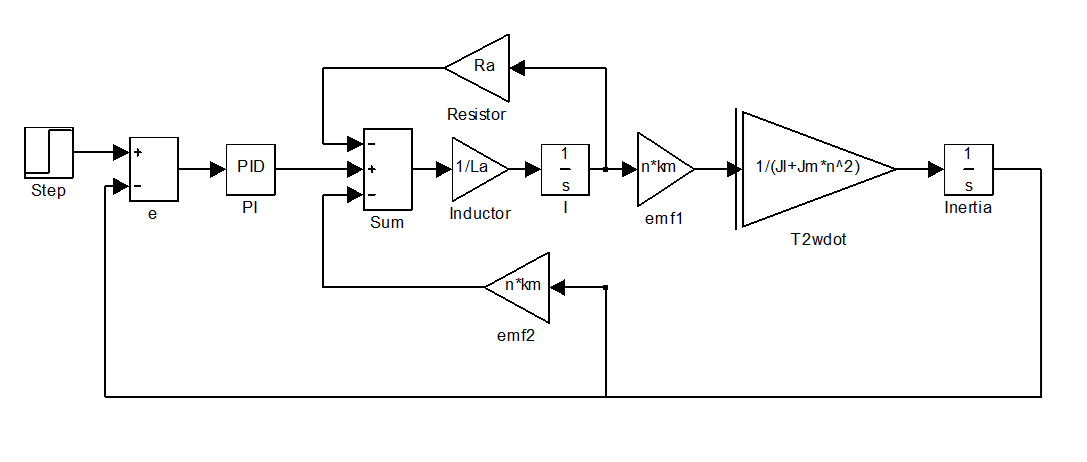
Comparing the models, it is obvious that the block-oriented approach is more difficult and time-consuming to set up. It’s also more difficult to analyze as physical structure and interactions between the components have been replaced by the signal flow.
The main message is that modeling is greatly simplified by the concept of physical modeling. Here you only have one component implementation independent of how it will be connected and used in a system.
Changing the model structure🔗
A key advantage of the physics-based approach is the ability to reuse a model. Extending the physical-based model with a new component is straightforward as seen in Figure 3, where a flexible shaft has been added to the drive train.
Adding the flexible shaft changes the calculation order of the model. For the block-oriented approach, this means that a large part of the model needs to be re-modeled. This is not the case for the physics-based model as this step is done automatically by the tool.
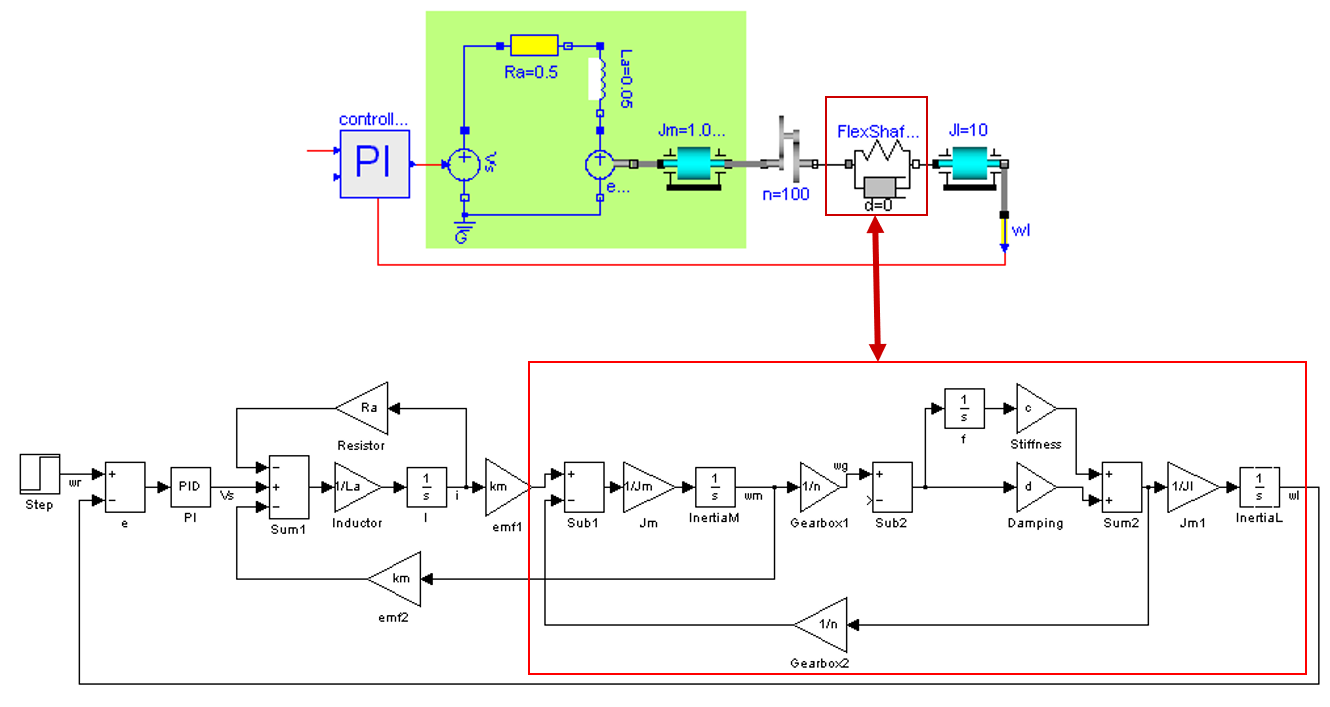
To conclude, block-oriented models are not suitable for large-scale modeling or when the modeling requirements or usage change.